
Page 26 - Flipmag-01
P. 26
Tech Briefs
forces has been gaining traction in re- immediate effect on the UGV to accu- The last algorithm employed in this
cent years. This is largely attributed to rately maneuver through a user-desig- research was the use of feature recogni-
the urgent need for reducing the opera- nated route. Any inaccurate tuning of tion through image processing, which
tional risks faced by troops in a multi- the parameters resulted in the UGV ex- gave the UGV the capabilities to iden-
tude of situations located within the hibiting instability in its maneuver, tify potential targets in its operational
various theaters of war. The pace for the often causing the system to veer off environment. Similarly, parameters re-
development and deployment of un- course or, even failing to reach its des- quiring adjustment for the system to
manned ground vehicles (UGV) was, ignated position. recognize the designated targets under
however, not keeping up with that of As part of its autonomous capabili- varying light conditions and target pro-
the other assets deployed in the aerial ties, the UGV was designed to possess file exposure were also noted.
and naval realms of the military. obstacle avoidance capabilities with the This research was based on a Pioneer
This research focuses on imple- use of the vector field histogram algo- 3AT robot platform equipped with light
menting a systems engineering ap- rithm. Parameters governing the detec- detecting and ranging (LIDAR) sensor,
proach for the rapid development of tion and avoidance of obstacles were orientation sensor, image camera and
UGVs by exploring the requirements, tuned in order for the system to per- an onboard mainframe computer as its
available technologies, and the salient form adequately through the desig- primary hardware to detect, process and
points on the development and tun- nated test route. These parameters in- execute the autonomous behavior of
ing of the algorithm parameters that cluded the detection limits of its sensor the UGV. Software programs such as
govern the guidance, navigation, con- suite and the certainty thresholds of Ubuntu, MATLAB and Robotic Operat-
trol and target identification efficacy the algorithm to properly perceive the ing System (ROS) were also used in sup-
of the system. presence or discard the possibility of an port of the system architecture to com-
Though platform specific, various obstacle within its path. pute all variables for UGV operations.
tuning parameters were adjusted such The implementation of the two al- Development and testing of the UGV
as the linear velocity, angular velocity gorithms – the pure pursuit method prototype was conducted within a lab
and look-ahead distance within the and the vector field histogram algo- environment. This resulted in a verifica-
pure pursuit method, which was imple- rithm – allowed the system to maneu- tion set-up where the efficacy of the sys-
mented for the UGV’s path following ver efficiently through the user de- tem was tested through varying light
the algorithm. These parameters had an fined test route. conditions and obstacle positioning to
0
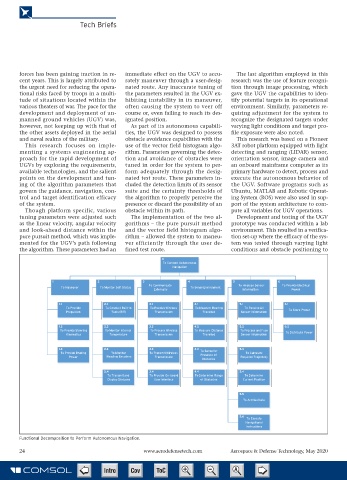
To Conduct Autonomous
Navigation
1 2 3 4 5 6
To Communicate To Analyse Sensor To Provide Electrical
To Maneuver To Monitor Self Status To Sense Environment
Externally Information Power
1.1 2.1 3.1 4.1 5.1 6.1
To Provide To Conduct Built-In To Receive Wireless To Measure Bearing To Receive All
To Store Power
Propulsion Tests (BIT) Transmission Travelled Sensor Information
1.2 2.2 3.2 4.2 5.2 6.2
To Provide Steering To Monitor Internal To Process Wireless To Measure Distance To Process and Fuse To Distribute Power
Kinematics Temperature Transmission Travelled Sensor Information
1.3 2.3 3.3 4.3 To Sense for 5.3
To Provide Braking To Monitor To Transmit Wireless Presence of To Calculate
Power Reading Encoders Transmission Required Trajectory
Obstacles
2.4 3.4 4.4 5.4
-
To Transmit and To Provide On board To Determine Range To Determine
Display Statuses User Interface of Obstacles Current Position
5.5
To Archive Data
5.6
To Execute
Navigational
Instructions
Functional Decomposition to Perform Autonomous Navigation.
24 www.aerodefensetech.com Aerospace & Defense Technology, May 2020