
Page 29 - Flipmag-01
P. 29
Tech Briefs
Assessing the Effectiveness of a Combat UGV Swarm in
Urban Operations
Fighting in urban areas is extremely complex and challenging due to multi-story structures, new
engagement conditions, and the consideration of civilian-military relations, but recent technological
advancements could enable the military to employ robotic platforms in swarms to help overcome
operational challenges in an urban environment.
Naval Postgraduate School, Monterey, California
he global trend of urbanization that awareness, equipment, and training to the capability to deal with improvised
Tbegan after World War II continues overcome these challenges. explosive devices. It is evident that full
to grow rapidly. In 2014, 54 percent of Technological advancements in re- autonomy for an unmanned combat
the world’s population resided in urban cent years have equipped armed forces ground vehicle such as the MM-UGV is
areas, compared to only 30 percent in to meet these challenging demands. a far-term capability anticipated by the
1950, and the United Nations estimates Such advancements include military ro- U.S. Army.
that by 2050, that number will reach 66 botic platforms, which are now fre- To meet the future capabilities re-
percent. This global trend necessarily quently employed by troops for explo- quirement as identified in the U.S.
contributes to a shift in the characteris- sive ordinance disposal, loading and Army UGV campaign plan, unmanned
tics of any future potential conflicts, and carrying heavy items, and repairing ground vehicles require further techno-
as a result, in the way urban warfare ground conditions under fire. Further- logical advancement. For the micro-
would be conducted. more, according to the 2011 unmanned and nano-bots depicted in the figure,
Fighting in urban areas is extremely ground systems roadmap report by the swarming is considered to be one of the
complex and challenging. The third di- Robotic Systems Joint Project Office (RS most promising capabilities to be devel-
mension in urban areas, such as subter- JPO) of the United States Department of oped. Swarm intelligence is an artificial
ranean and multi-story structures, af- Defense (DoD), there are plans to de- intelligence discipline that consists of a
fects the line of sight and engagement velop armed unmanned ground vehi- multi-agent system that takes inspira-
conditions, thus increasing the com- cles (UGV) with combat abilities within tion from the behavior of colonies of so-
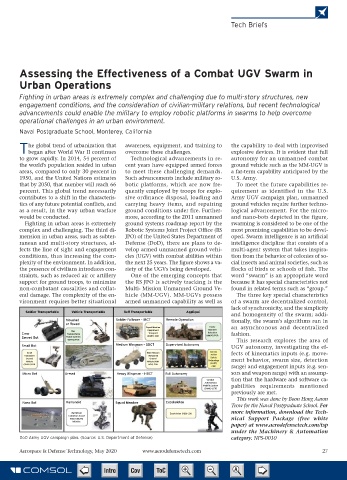
plexity of the environment. In addition, the next 25 years. The figure shows a va- cial insects and animal societies, such as
the presence of civilians introduces con- riety of the UGVs being developed. flocks of birds or schools of fish. The
straints, such as reduced air or artillery One of the emerging concepts that word “swarm” is an appropriate word
support for ground troops, to minimize the RS JPO is actively tracking is the because it has special characteristics not
non-combatant causalities and collat- Multi- Mission Unmanned Ground Ve- found in related terms such as “group.”
eral damage. The complexity of the en- hicle (MM-UGV). MM-UGVs possess The three key special characteristics
vironment requires better situational armed unmanned capability as well as of a swarm are decentralized control,
lack of synchronicity, and the simplicity
Soldier Transportable Vehicle Transportable Self Transportable Applique ´
and homogeneity of the swarm; addi-
Mounted Soldier Follower – IBCT Remote Operation tionally, the swarm’s algorithms run in
or Towed
Squad Missiion Husky an asynchronous and decentralized
Equiptment Mounted
Man
Detection
Crew Transportable Transport (HMDS) POR fashion.
Served Bot Robot Systems (SMET) CDD
(MTRS) POR This research explores the area of
Small Bot Medium Wingman – SBCT Supervised Autonomy UGV autonomy, investigating the ef-
Convoy
Small Multi-Mission fects of kinematics inputs (e.g. move-
Unmanned Unmanned Active
Safety
Ground Ground ment behavior, swarm size, detection
Vehicle Vehicle (MM- Technology
(SUGV) CDD UGV) CDD (CAST)
CDD range) and engagement inputs (e.g. sen-
Micro Bot Armed Heavy Wingman – HBCT Full Autonomy sors and weapon range) with an assump-
tion that the hardware and software ca-
Combat
Autonomous
Mobility System pabilities requirements mentioned
(CAMS) JCTD
previously are met.
This work was done by Boon Hong Aaron
Nano Bot Humanoid Squad Member Exoskeleton
Teow for the Naval Postgraduate School. For
more information, download the Tech-
Battlefield Exoskeleton (XOS) CDD
Extraction Assist
Robot (BEAR) nical Support Package (free white
Initiative
paper) at www.aerodefensetech.com/tsp
under the Machinery & Automation
DoD Army UGV campaign plan. (Source: U.S. Department of Defense) category. NPS-0010
Aerospace & Defense Technology, May 2020 www.aerodefensetech.com 27